
1 Einleitung und Ziele
Diese Arbeit ist Teil des Forschungsprojekts der Europäischen Agentur für Sicherheit und Gesundheitsschutz am Arbeitsplatz (EU-OSHA) „Overview of Policies, Research and Practices in Relation to Advanced Robotics and AI-based Systems for Automation of Tasks and OSH“ (Übersicht über politische Maßnahmen, Forschung und Verfahren im Zusammenhang mit fortgeschrittener Robotik und KI-basierten Systemen für die Automatisierung von Tätigkeiten und Sicherheit und Gesundheit bei der Arbeit). Ziel dieses Berichts ist, gemäß der im Bericht der EU-OSHA „Fortgeschrittene Robotik, künstliche Intelligenz und Automatisierung von Tätigkeiten: Definitionen, Einsatzgebiete, Maßnahmen und Strategien und Sicherheit sowie Gesundheit bei der Arbeit“ (EU-OSHA, 2022a) entwickelten Taxonomie Herausforderungen und Chancen im Zusammenhang mit der Automatisierung physischer Tätigkeiten durch Robotiksysteme vorzustellen. Um physische Tätigkeiten zu unterstützen oder zu ersetzen, werden vornehmlich moderne Robotiktechnologien, wie mobile Roboter, Montageroboter und Robotik-Exoskelette eingesetzt, und die Bandbreite der physischen Tätigkeiten und Funktionen, die sie unterstützen können, nimmt stetig zu. Darüber hinaus wird in diesem Bericht eine Vielzahl von Wirtschaftszweigen und Arbeitsplätzen mit voll- oder halbautomatisierten physischen Tätigkeiten beschrieben. Schließlich werden die Auswirkungen der Automatisierung durch Robotiksysteme auf arbeitsbezogene physische, psychosoziale und organisatorische Arbeitsschutzaspekte und damit die bisherigen und künftigen Herausforderungen und Chancen für den Arbeitsschutz geschildert.
2 Methodik
Die für diesen Bericht angewandte Methodik und die wichtigsten genutzten Datenquellen beinhalten systematische Überprüfungen und Metaanalysen sowie eine Auswertung grauer Literatur und die Suche späterer Zitationen (forward ciation search), um weitere wissenschaftliche Arbeiten zu ermitteln. Die Überprüfungen deckten in erster Linie die Bereiche Künstliche Intelligenz (KI), Mensch-Roboter- Interaktion (MRI) und Automatisierung von Tätigkeiten ab, wobei an das PEO-Schema (Population, Exposure, Outcome) angelehnte Suchbegriffe verwendet wurden. Es wurden insgesamt 4 070 Ergebnisse geprüft, von denen 111 für dieses Projekt relevante Informationen enthielten. Ergänzt wurden die Ergebnisse durch eine zusätzliche Auswertung von Literatur zu einer Vielzahl von Bereichen. Zusätzlich wurden halbstrukturierte Befragungen einer ausgewählten Gruppe von Experten für fortgeschrittene Robotik durchgeführt, um zusätzliche qualitative Erkenntnisse über die Automatisierung physischer Tätigkeiten zu gewinnen. Insgesamt wurden neun Befragungen durchgeführt.
3 Fortgeschrittene Robotik und Arten von Tätigkeiten
Die Forschungsergebnisse wurden danach eingestuft, ob es sich um personenbezogene, informationsbezogene oder objektbezogene Tätigkeiten handelt und ob die betreffende Tätigkeit voll automatisiert oder halb automatisiert ist. Auf einer weiteren Ebene wurden die automatisierten Tätigkeiten in Routine- und Nicht-Routine-Tätigkeiten unterteilt, sofern sie als solche erkennbar waren. Die Ergebnisse zeigen, dass in der ausgewerteten Literatur nicht jede mögliche Kombination dieser Kategorien vertreten ist. Aktuell unterstützen die verfügbaren Systeme hauptsächlich Routinetätigkeiten. Im Zuge der Entwicklung künftiger technologischer Fähigkeiten wird die Automatisierung von nicht routinemäßig anfallenden Tätigkeiten jedoch wahrscheinlicher.
3.1 Vollautomatisierung (Ersetzung) von Tätigkeiten durch fortgeschrittene Robotik
3.1.1 Personenbezogen
Im Rahmen einer personenbezogenen Tätigkeit kommt es zu einer gewissen Interaktion zwischen einer Person und der Technologie. Diese Interaktion ist nicht speziell auf den Nutzer und die Technologie beschränkt, sondern kann auch über diese Beteiligten hinausreichen. Robotiksysteme, die Krankenpflegekräfte beim Heben von Patienten unterstützen, sind ein hervorragendes Beispiel für die Automatisierung einer personenbezogenen Tätigkeit.
Routinetätigkeit
Um als Routinetätigkeit eingestuft zu werden, müssen die Schritte des automatisierten Prozesses ein Wiederholungselement aufweisen, das sich von einer Ausführung zur anderen nicht verändert. Die Definition der Routine ist aus technischer Perspektive enger gefasst als aus menschlicher Perspektive. Beispiele für physische personenbezogene Routinetätigkeiten finden sich in erster Linie im Gesundheitswesen. Robotik-Pflegesysteme unterstützen Pflegekräfte bei der Ausführung von für sie nicht kritischen Tätigkeiten und verringern so die psychische und physische Arbeitsbelastung. Dazu gehört unter anderem, „Kanülen zu legen“, um Blut abzunehmen oder Arzneimittel zu verabreichen. Spezialisierte Pflegeroboter können ohne Unterstützung einer Pflegekraft Patienten aus dem Bett heben und in den Rollstuhl setzen oder ihnen beim Aufstehen helfen (Kyrarini et al., 2021). Die Unterstützung von Patienten beim Gehen und das Holen von Gegenständen können ebenfalls voll automatisiert werden. Die Unterstützung beim Essen und Trinken ist ebenfalls eine in aller Regel sehr zeit- und arbeitsintensive Tätigkeit im Gesundheitswesen (Kyrarini et al., 2021). Spezialisierte Operationsroboter unterstützen medizinische Fachkräfte bei den verschiedensten Tätigkeiten. Bei Operationen werden von den Ärzten routinemäßig Nähte gelegt, ein wesentlicher Faktor für den Gesamterfolg des Eingriffs (Manolesou et al., 2021).
3.1.2 Objektbezogen
Physische objektbezogene Tätigkeiten sind wohl die bekannteste Art des Einsatzes von Robotiksystemen. Industrieroboter, die Pick-and-Place-Tätigkeiten (Werkstücke aufnehmen, positionieren und ablegen) ausführen, gehörten zu den ersten voll automatisierten Systemen in der Arbeitswelt.
Routinetätigkeit
Tätigkeiten wie Schweißen, Montieren, Sprühlackieren, Verpacken und Zusammenstellen, Schneiden, Handhaben und Schleifen können in der Fertigung von voll automatisierten Robotiksystemen übernommen werden (Iqbal et al., 2016). Das entspricht den Tätigkeiten, die von den befragten Experten genannt wurden. Zusätzlich erwähnten diese das Heben schwerer Lasten, physische Präzisionstätigkeiten wie Pick-and-Place und die Produktion kleiner Volumina von Montageumfängen bei Produkten und Präzisionsarbeiten mit breit gestreuter Spezialisierung. Logistik- und Transporttätigkeiten sind weitverbreitete Einsatzmöglichkeiten in Lagerhäusern, Krankenhäusern und Supermärkten. Im Bergbau sind Robotiksysteme weit verbreitet und übernehmen die Bedienung schweren Geräts sowie Hebetätigkeiten, Planierarbeiten, Ausschachtung und Förderung sowie Bohrarbeiten und möglicherweise die Handhabung von Sprengstoffen (Plotnikov et al., 2020).
3.2 Halbautomatisierung (Unterstützung) von Tätigkeiten durch fortgeschrittene Robotik
Während manche Robotiksysteme bereits über die technologischen Fähigkeiten verfügen, um Tätigkeiten völlig selbständig auszuführen, gibt es eine Reihe von Tätigkeiten, die mithilfe einer teilweisen Automatisierung ausgeführt werden können, bei der der Mensch noch aktiv am Prozess beteiligt ist, aber keine Aufsichtsfunktion wahrnimmt.
3.2.1 Personenbezogen
Routinetätigkeit
Das medizinische Arbeitsumfeld umfasst eine Reihe einfacher physischer Tätigkeiten, die routinemäßig für die Patienten ausgeführt werden. Andere pflegebezogene Tätigkeiten, zu deren Unterstützung Roboter eingesetzt werden, sind Ankleiden und Körperpflege (Kyrarini et al., 2021). Der Prozess kann sich von Patient zu Patient unterscheiden, aber die manuelle Handhabung von Patienten in Form von Umlagern, Umsetzen und Heben ist eine arbeitsintensive, sich häufig wiederholende Tätigkeit. Wird ein Robotiksystem eingesetzt, kann das Pflegepersonal sich auf die Unterstützung des Patienten bei Sturz- oder Verletzungsgefahr fokussieren (Hu et al., 2011). Diese Tätigkeiten können zwar voll automatisiert sein, halb automatisierte Systeme sind im Augenblick in diesem Bereich aber weiter verbreitet.
3.2.2 Objektbezogen
Routinetätigkeit
Insbesondere in der Fertigung werden manche nicht automatisierte Tätigkeiten durch Einführung von Robotiksystemen bewusst auf Halbautomatisierung umgestellt. Fortgeschrittene Robotik übernimmt in Industrie und Fertigung zahlreiche Tätigkeiten, vom Aufnehmen, Verpacken und Palettieren, Schweißen und Montieren von Umfängen und der Handhabung von Werkstoffen bis hin zur Produktinspektion (Matheson et al., 2019). Gegenwärtig werden solche Tätigkeiten mit einem unterschiedlichen Anteil menschlicher Beteiligung durchgeführt, der von der Beaufsichtigung bis zur Zusammenarbeit reicht. Manche dieser Tätigkeiten sind eng mit dem Bauwesen verknüpft. Beispiele für solche Tätigkeiten sind automatisierte robotische Maurerarbeiten, die Bewegung schwerer Gegenstände mit einem von einem Bauarbeiter bedienten Roboterarm und Greifer sowie Betonpumpen, die mit spezialisierten Sensoren für die Messung kritischer Betriebsvarianten wie Ausrichtung, Winkel, Tiefen und Abständen ausgestattet sind.
3.2.3 Informationsbezogen
Routinetätigkeit
Wie bei den voll automatisierten Tätigkeiten wurden in der ausgewerteten Literatur keine untersuchten Fälle informationsbezogener physischer Tätigkeiten festgestellt, die von fortgeschrittenen Robotiksystemen ausgeführt werden. Bei der Untersuchung des tatsächlichen Einsatzes von Robotiksystemen stellte sich jedoch heraus, dass es Robotiksysteme gibt, die über Sensoren Informationen aus der Umgebung erfassen und zudem über Verarbeitungsfähigkeiten verfügen, die sie in die Lage versetzen würden, Maßnahmen vorzuschlagen, diese selbst zu ergreifen oder auch nur eine Warnung auszugeben. Es gibt zwar Anwendungsfälle für eine solche informationsbezogene Nutzung fortgeschrittener Robotiksysteme, aber keine ausreichende Erforschung ihrer Auswirkungen auf Sicherheit und Gesundheit bei der Arbeit in kognitiver und körperlicher Hinsicht.
3.3 Auswirkungen auf den Arbeitsmarkt
Über einen Zeitraum von zehn Jahren betrachtet, hat die Zahl der Arbeitsplätze für hochqualifizierte Arbeitskräfte mit Schwerpunkt auf Analysetätigkeiten zugenommen. Diese Fachkräfte müssen schnell lernen können und über die Fertigkeiten für eine rasche Anpassung an neue technologische Entwicklungen verfügen. Die Umschulung und Weiterbildung von Arbeitskräften wird sowohl als Konsequenz daraus wie auch als erforderlicher Schritt für ein weiteres Wachstum in der Industrie gesehen (de Vries et al., 2020). Dies fügt sich in das bereits bekannte Narrativ ein, dass die gegenwärtigen Veränderungen aufgrund von Robotiksystemen dazu führen werden, dass die Bildungsziele für die Beschäftigten im Sinne der Förderung kontinuierlichen Lernens und des Aufbaus der richtigen, flexiblen neuen Fertigkeiten neu gedacht werden (Kim und Park, 2020).
Beschäftigte im Gesundheitswesen werden die Auswirkungen der Automatisierung körperlicher Tätigkeiten spüren. Es wurde festgestellt, dass Arbeitsplätze im Krankenhaus, die nicht mindestens einen Bachelorabschluss voraussetzen, zunehmend verschwinden, was auf eine Verlagerung hin zu mehr wissens- und kognitiv-basierter Arbeit hindeutet (Terminino und Rimbau Gilabert, 2018). Die Automatisierung physischer Tätigkeiten aufgrund der Automatisierung durch Robotiksysteme wird sich für die Pflegekräfte vor allem im Sinne einer Verringerung der körperlichen Belastung auswirken (Denault et al., 2019). Die Forschungsarbeit von Sen et al. (2020) zu arbeitsbedingten Muskel- und Skeletterkrankungen im Bergbau ergab, dass Arbeitsplätze im Bergbau besonders von einer Automatisierung profitieren würden, um Muskel- und Skeletterkrankungen und das Gesamtrisiko bei der Arbeit zu reduzieren. Lagerhäuser können ebenfalls ein gefährliches Umfeld sein. Verbreitete Sicherheitsrisiken für Beschäftigte sind Ausrutschen, Stolpern und Stürze aus der Höhe. Wenn Roboter eingesetzt werden, um die Notwendigkeit zu verringern, dass Beschäftigte in großer Höhe arbeiten oder Hochrisikoausrüstung wie Gabelstapler bedienen müssen, könnte sich ein beträchtlicher Nutzen für die Bedienersicherheit ergeben. Für Bauarbeiter liegt einer der Hauptvorteile des Einsatzes von Robotik in ihrem Potenzial, sich wiederholende oder gefährliche Tätigkeiten im Bauwesen zu unterstützen. Diese Verlagerung bedeutet jedoch auch, dass alle Gruppen von Beschäftigten neue Fertigkeiten für die Handhabung und Beaufsichtigung der Maschinen erwerben müssen.
3.4 Auswirkungen auf verschiedene Wirtschaftszweige
Die Analyse der automatisierten physischen Tätigkeiten in den verschiedenen Wirtschaftszweigen zeigt eine hohe Zahl automatisierter oder unterstützter Tätigkeiten im Bereich Gesundheits- und Sozialwesen. Hier finden sich die meisten Tätigkeiten bei Abläufen im Krankenhaus. Die Vielzahl möglicher Anwendungen für Robotiksysteme deutet darauf hin, dass in naher Zukunft die Einführung von Robotern in diesem Arbeitsumfeld an Dynamik gewinnen wird. Auf Ebene der Wirtschaftszweige werden Gesundheits- und Sozialwesen voraussichtlich weiter an Bedeutung gewinnen, auch als wichtiges Einsatzgebiet für Robotiksysteme.
Zweitens ist der Bereich Fertigung stark betroffen. Die Experten sind sich darüber einig, dass der Einsatz fortgeschrittener Robotik im Augenblick hauptsächlich in der Fertigung erfolgt. Es gibt zahlreiche Beispiele für nahezu voll automatisierte Fabriken in Bereichen wie der Automobilindustrie.
Die Transport- und Lagerhaltungsbranche insgesamt findet in der wissenschaftlichen Literatur ebenfalls häufig Erwähnung und wird auch von den Experten genannt. Insbesondere die Logistik erfährt aufgrund der Zunahme des elektronischen Geschäftsverkehrs, der Individualisierung in der Massenproduktion und der Just-in-time-Philosophie einen raschen Wandel. Der Prozess der Ersetzung von Arbeitskräften durch Automatisierung und Robotik verstärkt sich in modernen Bergbauprozessen. In der wissenschaftlichen Literatur seltener erwähnt, aber von den Experten hervorgehoben werden die Wirtschaftszweige Bauwesen sowie Land- und Fortwirtschaft sowie Fischerei.
4 Folgen für Sicherheit und Gesundheit bei der Arbeit
4.1 Psychosoziale Auswirkungen
Viele psychologische Aspekte werden auch unabhängig von der konkreten Art der Tätigkeit erörtert und können bis zu einem gewissen Grad gleichermaßen auf physische Tätigkeiten angewendet werden. Die Rahmenuntersuchung zur Interaktion von Mensch und Maschine und zur Gesundheit bei der Arbeit enthält relevante Kategorien für die Interaktionen von Mensch und Maschine, die bei der Folgenanalyse im Zusammenhang mit der Automatisierung von Tätigkeiten herangezogen werden können. Die relevanten Kategorien sind „Funktionszuweisung, Schnittstellen- und Interaktionsgestaltung sowie Betrieb und Beaufsichtigung von Maschinen und Systemen“ (Robelski und Wischniewski, 2018). Der Aspekt der Funktionszuweisung innerhalb der Automatisierung von Tätigkeiten erfordert, dass die Arbeitstätigkeit selbst die Aufteilung der Funktionen zwischen Mensch und Maschine, in diesem Fall fortgeschrittene Robotiksysteme, bestimmt (Robelski und Wischniewski, 2018). Ein verbreitetes Phänomen im Zusammenhang mit der Automatisierung von Tätigkeiten ist das übersteigerte Vertrauen in die Automatisierung (Automation Complacency). Studien zeigen, dass Fachwissen und berufliche Weiterbildung dieses übersteigerte Vertrauen nicht eindämmen. Wie von Parasuraman und Manzey (2010) zusammengefasst wurde, herrscht in der wissenschaftlichen Literatur Einvernehmen darüber, dass drei Hauptfaktoren zum Automatisierungsbias (verzerrte Wahrnehmung aufgrund der Automatisierung) beitragen. Der erste ist die bei Menschen in Entscheidungsprozessen beobachtete Neigung, den Weg der geringsten kognitiven Anstrengung zu nehmen. Der zweite Faktor beschreibt die Neigung der Nutzer, die Leistung und Autorität der automatisierten Systeme zu überschätzen. Der dritte Faktor, der zum Automatisierungsbias beiträgt, ist ein Phänomen, das auch bei einer Arbeitsteilung unter Menschen zu beobachten ist. Die Verteilung der Verantwortung führt zu Social Loafing (sozialem Faulenzen), der Neigung von Menschen, sich selbst weniger anzustrengen, wenn sie mit anderen zusammenarbeiten (Parasuraman und Manzey, 2010).
Vertrauen
Eine beträchtliche Zahl von Studien haben die Hintergründe des Vertrauens in Robotiksysteme untersucht. Es besteht Einigkeit darüber, dass die Hintergründe, die sich wesentlich auf das menschliche Vertrauen in Roboter auswirken, menschen-, roboter- oder kontextbezogen sein können und daher bei der Verwendung von Robotiksystemen für die Automatisierung von Tätigkeiten sorgfältiger Berücksichtigung bedürfen (Hancock et al., 2011; Hancock et al., 2020). Bei den roboterbezogenen Hintergründen wirken sich Attribute und Leistung eines Roboters am stärksten auf das Vertrauen aus. Es ist wichtig, nicht nur vertrauensstärkende Aspekte zu berücksichtigen, sondern auch daran zu denken, dass manche Aspekte schädliche Auswirkungen auf die Ausführung der Tätigkeiten oder andere Probleme mit sich bringen können (Hancock et al., 2020). Unangebrachter Anthropomorphismus kann zu gefährlichen Situationen führen, wie unerwartetem Verhalten, Nichterkennung von Versagen der Automatisierung oder allzu langsame Reaktion auf das Versagen der Automatisierung (Papadimitriou et al., 2020).
4.1.1 Gestaltung der Tätigkeit
Kontrolle über die eigene Arbeit
Das Konzept der Kontrolle über die eigene Arbeit, das die Dimension des Entscheidungsspielraums, der Arbeitszeitgestaltung und der Kontrolle über die Abläufe an sich beinhaltet, hat in der Arbeitspsychologie eine lange Geschichte. Die positiven Auswirkungen, die die Kontrolle über die eigene Arbeit auf Wohlbefinden, Motivation, Zufriedenheit und psychische Gesundheit der Beschäftigten haben kann, insbesondere zum Ausgleich hoher beruflicher Anforderungen, sind in der wissenschaftlichen Literatur hinreichend beschrieben (Bakker und Demerouti, 2007; Karasek, 1979, 1998). Im Hinblick auf die Veränderung der Eigenschaften von Tätigkeiten und des Grads der Kontrolle über die eigene Arbeit beim Einsatz fortgeschrittener Robotik für die (Halb-)Automatisierung von Tätigkeiten erwähnten die befragten Experten auch die Gefahr einer fehlenden Selbstwirksamkeit aufgrund neuer oder veränderter Tätigkeiten. Wenn jedoch die Grenzen von Tätigkeit und System nicht klar sind, könnte die Gefahr bestehen, dass die Kontrolle über die eigene Arbeit oder der Entscheidungsspielraum zu umfangreich werden, was wiederum zu einer Beeinträchtigung des Wohlbefindens oder zu Stress führen könnte.
Gefühl der Kontrolle
Tätigkeitseigenschaften, die durch den Grad der Kontrolle über die eigene Arbeit definiert sind, können von menschlichen Arbeitskräften unterschiedlich wahrgenommen werden. Eng verknüpft mit dem Konzept der Kontrolle über die eigene Arbeit ist daher das subjektive Gefühl der Kontrolle, das ebenfalls ein etabliertes Konzept in der Psychologie ist (Spector, 1998). Die wachsende Autonomie von Robotiksystemen könnte Arbeitskräfte dazu veranlassen, ihnen Tätigkeiten zuzuweisen, die das System bewältigen kann, ohne dass sie dabei das Gefühl haben, die Kontrolle über die Situation zu verlieren. Die Gefahr des Kontrollverlusts als subjektives Gefühl wie auch als objektiver Umstand wurde von den befragten Experten ebenfalls ausdrücklich erwähnt. Die Experten betonten weiterhin, dass der Grundsatz, dass der Mensch die Kontrolle behalten muss, eine vorrangige Leitlinie für die Gestaltung sein sollte.
Arbeitsintensität und Dequalifikation
Im Hinblick auf die Gestaltung von Arbeitstätigkeiten ist ein sehr häufig erörterter und herangezogener psychosozialer Arbeitsansatz der Aspekt der Arbeitsintensität, wie zum Beispiel beschrieben im Hinblick auf die Kontrolle über die eigene Arbeit im Job-Demand-Control Model (Anforderungs-Kontroll-Modell) (Karasek, 1979, 1998) oder im breiter gefassten Job-Demand-Resources Model (Arbeitsanforderungen- Arbeitsressourcen-Modell) (Demerouti et al., 2001). Die Verringerung der Vielfalt von Fertigkeiten wird auch bei der potenziellen Polarisierung von Arbeitsplätzen angesprochen, einer Hypothese, die in Verbindung mit der Automatisierung von Tätigkeiten und Digitalisierung der Arbeit erörtert wird. Vereinfacht ausgedrückt besagt sie, dass bei Arbeitsplätzen, die ein geringes Fertigkeitsniveau erfordern, die Automatisierung komplexer Routinetätigkeiten dazu führt, dass sich die Arbeit auf noch einfachere Tätigkeiten konzentriert, statt den Menschen in die Lage zu versetzen, Tätigkeiten auszuführen, die ein höheres Fertigkeitsniveau erfordern.
4.1.2 Gestaltung der Interaktion
In der wissenschaftlichen Literatur gibt es eine Reihe von Aspekten der Gestaltung der Robotik- Interaktion, die in Verbindung mit verschiedenen Arbeitsschutzaspekten erörtert werden. Aspekte der Gestaltung der Robotik und die Gestaltung der Interaktion können mit verschiedenen Attributen verbunden sein. Sie können sich zum Beispiel auf das äußere Erscheinungsbild und die Ausführung des Robotiksystems, das Verhalten und die Bewegung oder Interaktion der Robotik sowie Kommunikationsstile und -kanäle beziehen. Im Bereich des robotischen Bewegungsverhaltens werden Aspekte wie Schnelligkeit, Beschleunigung und Verzögerung, Bewegungsbahn und Annäherungs- oder Passierstrategien einbezogen. Die Kommunikation zwischen Menschen und fortgeschrittener Robotik kann in unterschiedlichem Umfang gestaltet werden. Verschiedene Aspekte der Interaktionsgestaltung sind in unterschiedlichem Umfang mit Risiken und Chancen für Sicherheit und Gesundheit bei der Arbeit verknüpft. Das Gesamtziel ist weiterhin, das Gefühl des Wohlbefindens, der Akzeptanz, des Vertrauens, positiver Emotionen und eines positiven Nutzererlebnisses oder Arbeitsablaufs zu steigern (siehe z. B. Honig et al., 2018). Ebenso soll die Interaktion nicht zu einem problematischen Maß von Arbeitsbelastung, Reizbarkeit, Anspannung oder Störungen führen, diese sollen vielmehr, soweit möglich, reduziert werden. Allerdings stehen die Aspekte der Robotikgestaltung nicht für sich allein, sondern müssen immer den betreffenden Kontext und die betreffende Arbeitsaufgabe betrachten.
Anthropomorphes Roboterdesign
Der Aspekt der visuellen Gestaltung und genauer gesagt des anthropomorphen Roboterdesigns wird in der wissenschaftlichen Literatur ausführlich behandelt. Anthropomorphes Roboterdesign kann positive Auswirkungen auf das Vertrauen zu Robotern haben. Designmerkmale wie Augen oder Gesichtsausdruck können die natürliche Interaktion, Akzeptanz und Sympathie fördern, insbesondere in der Sozialrobotik (Fink, 2012). Es kann jedoch auch negative Folgen eines anthropomorphen Designs geben. Diese Designmerkmale werden menschliche Erwartungen an die Fähigkeiten und an das Verhalten des Roboters auslösen (Zlotowski et al., 2015). Wenn ein System Merkmale wie Augen hat, erwarten wir, dass der Roboter visuelle Signale verarbeiten kann. Anthropomorphes Design kann sich auch auf Bewegungen oder Kommunikationsstrategien des Roboters beziehen. Ein diesbezügliches Missverhältnis kann zu Irritationen führen oder sogar dazu, dass die Zuverlässigkeit im Industriebereich als deutlich geringer wahrgenommen wird (Roesler et al., 2020). Allgemein gilt, dass ein anthropomorphes Designmerkmal nur aufgenommen werden sollte, wenn es einen funktionalen Zweck erfüllt.
Grundsätze der Dialoggestaltung
in der MRI
Eine bei der Gestaltung der Interaktion heranzuziehende Norm sind die in der DIN EN ISO 9241–110 formulierten Grundsätze der Interaktionsgestaltung (früher Grundsätze der Dialoggestaltung). Die Grundsätze der Interaktionsgestaltung und allgemeinen Empfehlungen für die Gestaltung können als Leitlinie für die Entwicklung und Bewertung von Benutzerschnittstellen dienen und so zu einer verbesserten Usability (Gebrauchstauglichkeit) führen. Sie haben sich als wichtig und hilfreich für die Gestaltung der Systeminteraktion im Kontext der „Industry 4.0“ (Fischer et al., 2017) und als geeignetes Instrument für die Nutzerbewertung von Robotiksystemen (Rosen et al., 2018) erwiesen. Insbesondere geht mit dem neuen Grad der Autonomie, der durch KI-basierte Systeme und fortgeschrittene Robotik am Arbeitsplatz eingebracht wird, eine neue Qualität der Interaktion einher, die durch die frühzeitige Anwendung der Grundsätze der Dialoggestaltung im Entwicklungsprozess bewertet und verbessert werden könnte.
Transparenz in der MRI
Insbesondere müssen Entwickler, aber auch Gesetzgeber angesichts der immer größeren Fähigkeiten und Autonomie von Robotiksystemen den Aspekt der Verantwortung und Rechenschaftspflicht in der Interaktion berücksichtigen. Menschen machen Roboter für ihre Fehler verantwortlich (Kahn et al., 2012), zumindest stärker als andere Arbeitsmittel. Die Benutzer machen den Roboter stärker und andere weniger verantwortlich, wenn im Arbeitsprozess Fehler auftreten. Allerdings sollte man nicht einfach davon ausgehen, dass es für den Benutzer notwendigerweise besser ist, wenn das System mehr Informationen liefert. Zu viel Information erhöht möglicherweise nicht die Transparenz eines Systems, sondern führt zu einer Informationsüberlastung und dem Unvermögen, kritische Informationen auszuwählen und zu verarbeiten (Finomore et al., 2011). Daher ist die Schaffung ausreichender Transparenz ein wichtiges, aber kompliziertes Unterfangen.
4.1.3 Betrieb und Überwachung
Die Dimension von Betrieb und Beaufsichtigung eines Systems kann als direkte Folge aus dem Prozess der Funktionszuweisung und der konkreten Gestaltung der Interaktion betrachtet werden (Robelski und Wischniewski, 2018).
Einstellung zu und Erfahrung
mit Robotern
Da Robotiksysteme, die am Arbeitsplatz eng mit Menschen interagieren, relativ neu sind, sind die Beschäftigten im Hinblick auf die Interaktion mit ihnen notwendigerweise unerfahren und nicht an eine solche Interaktion gewöhnt. Diese mangelnde Vertrautheit kann ihre Einstellung zu den Systemen beeinflussen und ihre erste Erfahrung prägen. Es ist bekannt, dass Nutzung und Erfahrung die Wahrnehmung und Einstellung der Arbeitskräfte im Hinblick auf Robotiksysteme verändern können. Mit wachsender Vertrautheit werden die Systeme als weniger neuartig empfunden, weil sich vorgefasste Meinungen über ihre Fähigkeiten und ihr Verhalten zu einem realistischeren Bild entwickeln (Sanders, 2019). Sowohl Vertrauen als auch Akzeptanz werden voraussichtlich zunehmen, wenn die Einstellung durch eigene Erfahrungen mit einem System geprägt wird (Hancock et al., 2011). Nomura et al. (2011) stellten fest, dass negative Einstellungen gegenüber Robotern in dem Maße abnahmen, in dem Erfahrungen mit der Interaktion mit ihnen zunahmen.
Soziale Unterstützung
Soziale Unterstützung am Arbeitsplatz, zum Beispiel durch Teammitglieder und Kollegen, gilt als wichtiger Faktor für Wohlbefinden und Zufriedenheit. Aus der Forschung wissen wir, dass soziale Unterstützung die Wirkung gefühlter arbeitsbezogener Stressfaktoren mildern und die erlebte Belastung reduzieren kann (Viswesvaran et al., 1999). Die (Halb-)Automatisierung von Tätigkeiten, die bisher von Menschen ausgeführt wurden, könnte letztendlich zu neuen Teamstrukturen führen. Ein mögliches Risiko könnte eine Abnahme der wahrgenommenen sozialen Unterstützung sein, da die Interaktion mit den menschlichen Teammitgliedern zurückgehen könnte.
Angst vor Arbeitsplatzverlust
Manche Beschäftigte werden Robotiksysteme nicht als nützliche Technologie, sondern als potenzielle Gefahr für ihre Beschäftigung sehen. Reichert und Tauchmann (2011) untersuchten den Grad der psychischen Belastung bei Beschäftigten in unsicheren Beschäftigungsverhältnissen und stellten fest, dass Beschäftigte mit geringer Sicherheit des Arbeitsplatzes eine schlechtere psychische Gesundheit haben. Weiterhin leiden Beschäftigte mit psychischen Vorerkrankungen besonders unter den Auswirkungen von unsicheren Beschäftigungsverhältnissen. Kozak et al. (2020) kamen zu dem Schluss, dass unsichere Beschäftigungsverhältnisse infolge von Robotiksystemen keine irrationale Angst vor dem Unbekannten darstellen, sondern vielmehr eine rationale Betrachtung der Risiken einer Automatisierung von Tätigkeiten, denen Arbeitskräfte ausgesetzt sind. Sie betonen die Notwendigkeit weiterer Maßnahmen zur Kompetenzentwicklung der Arbeitskräfte, um sowohl dem tatsächlichen Verlust von Arbeitsplätzen als auch der subjektiven Angst davor entgegenzuwirken.
4.2 Physische Auswirkungen
Die physischen Auswirkungen der Automatisierung von Tätigkeiten durch Robotiksysteme können in potenzielle und intendierte Vorteile und mögliche Risiken eingestuft werden. Zu den positiven Auswirkungen zählt als ein wichtiger Bereich, dass menschliche Arbeitskräfte nicht mehr in gefährlichen oder belastenden Umgebungen eingesetzt werden (Gharbia et al., 2019; Sen et al., 2014). Die andere Gruppe positiver Auswirkungen rührt daher, dass Robotiksysteme die Arbeitskräfte bei bestimmten Tätigkeiten physisch unterstützen, die durch ständige oder wiederholte körperliche Belastung die Gesundheit gefährden (Kyrarini et al., 2021). Viele durch Robotiksysteme automatisierte allgemeine Tätigkeiten, wie das Heben von Werkstücken oder auch der Transport eines Gegenstands am Arbeitsplatz, können in diese Kategorie fallen. Bei Pflegekräften sind Arbeitsbedingte Muskel-Skelett- Beschwerden und -Verletzungen weit verbreitet. Daher kann die Automatisierung besonders belastender Tätigkeiten ihrer Gesundheit sehr förderlich sein. Eine Arbeitszelle sollte eine Reduzierung der physischen Arbeitsbelastung durch Anpassung des Arbeitszyklus und der Leistung des Robotersystems an den körperlichen Zustand des Bedieners erlauben. Das soll dem körperlichen Wohlbefinden der Arbeitskräfte zugutekommen und entspricht der Interpretation der Befragten im Hinblick auf mögliche Auswirkungen eines Roboters auf die Arbeitskräfte.
Neben positiven Veränderungen im Hinblick auf den körperlichen Zustand der Arbeitskräfte kann neue Technologie nach Ansicht der Experten auch neue physische Gefahren mit sich bringen. Da viele Robotiksysteme gegenwärtig eine Aufgabe ausführen, die Bewegung beinhaltet, möglicherweise eine Bewegung mit zusätzlicher physischer Last, wurde wiederholt auf die Gefahr von Zusammenstößen hingewiesen. Während ein Zusammenstoß zwischen einer Arbeitskraft und einem Robotik-System ohnehin eine Gesundheitsgefahr darstellt, erhöht sich die Verletzungsgefahr, wenn der Roboter einen Gegenstand handhabt oder mit einem scharfen oder spitzen Greifer ausgestattet ist. Unbeabsichtigte Bewegungen können den Menschen treffen oder die Person kann zwischen dem Roboter und einem festen Teil eingeklemmt werden und sich dabei zum Beispiel die Hand quetschen. Daher ist eine Begrenzung der Kraft bei Berührung in Erwägung zu ziehen. Ein weiterer Risikofaktor ist mechanisches Versagen: Wenn keine ordnungsgemäße Wartung erfolgt, könnte es zu einem Fehler kommen, möglicherweise mit demselben Ergebnis wie bei einem Steuerungsfehler.
4.3 Organisatorische Auswirkungen
Werden künftige Veränderungen gegenüber den Beschäftigten kommuniziert, kann dies das Gefühl der Ungewissheit im Hinblick auf die Gründe für die Veränderung verringern. Darüber hinaus wurde auch festgestellt, dass klare und direkte Kommunikation den Wandel und unterstützendes Verhalten der Arbeitskräfte fördert (Bordia et al., 2004). Neben der Kommunikation im Vorfeld der Einführung muss der Arbeitsbereich, in dem der Roboter eingesetzt wird, neu organisiert und die Tätigkeiten der Arbeitskräfte müssen neu definiert werden. Hier wurde von den befragten Experten insbesondere der Aspekt der Risikobewertungen betont. Zudem nannten die Experten Aus- und Weiterbildung der Beschäftigten, Bewertung und Beaufsichtigung der Arbeitsstätte und Verfahren für gute Wartung als potenzielle Instrumente.
Eine der größten organisatorischen Veränderungen, mit denen diese Arbeitsumgebungen konfrontiert sein werden, ist der Umschulungs- und Weiterbildungsbedarf. Dies bedeutet, die Mitarbeiter für die Arbeit mit der neuen Robotiktechnologie zu schulen und zugleich Dequalifikation und den Verlust anderer wichtiger Kompetenzen zu vermeiden. Werden diese Faktoren berücksichtigt und den Beschäftigten die nötigen Chancen angeboten, könnte dies ihre Beteiligung an den organisatorischen Veränderungen stärken. Es hat sich gezeigt, dass die Beteiligung der Beschäftigten an Umsetzung und Entscheidungsfindung unterstützendes Verhalten der Beschäftigten fördert (Gagne et al., 2000).
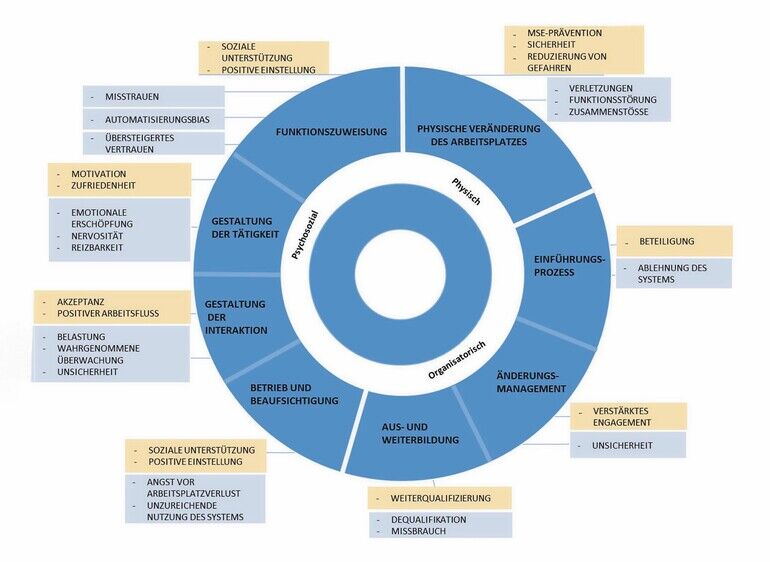
Abbildung 1 zeigt eine Übersicht der relevanten ermittelten Dimensionen in Bezug auf psychosoziale, physische und organisatorische Aspekte sowie möglicherweise damit verbundene Risiken und Vorteile für Sicherheit und Gesundheit bei der Arbeit.
4.4 Normen
Abgesehen von den Typ-A-Normen (grundlegenden Sicherheitsnormen) und Typ-B-Normen (allgemeinen Sicherheitsnormen), die ggf. ebenfalls gelten, gibt es aktuell drei Maschinensicherheitsnormen (Typ-C-Normen) für Robotiksysteme. Die vollständige Liste ist dem Bericht zu entnehmen. Zusammenfassend lässt sich sagen, dass die Experten im Hinblick auf Robotiksysteme bestimmte Aspekte der vorhandenen Normen für verbesserungswürdig halten. Es besteht jedoch nach Meinung der Experten gegenwärtig kein Bedarf an zusätzlichen Normen. Dies spiegelt die aktuelle Zahl voll integrierter MRI-Anwendungen wieder, die wir gegenwärtig in Europa haben, wie zum Beispiel aus den ESENER-3-Daten hervorgeht (EU-OSHA, 2022a). Im Rahmen der Forschung für dieses Projekt wurden bestimmte Risiken im Zusammenhang mit Sicherheit und Gesundheit bei der Arbeit ermittelt, die sich aus fortgeschrittener Robotik und KI-basierten Systemen ergeben. Es gibt zwar spezielle Risiken in Verbindung mit der Nutzung fortgeschrittener Robotik, Instrumente der Risikobewertung, die sowohl die Risikoermittlung als auch die Risikoanalyse abdecken, sind gegenwärtig jedoch selten und oft schwer erhältlich.
4.5 Risikobewertung
Die konkreten Auswirkungen der Einführung von fortgeschrittener Robotik oder einem KI-basierten System an einem Arbeitsplatz sind häufig schwer zu messen und je nach konkretem System, automatisierter Tätigkeit und Umfeld unterschiedlich. Dasselbe gilt auch für das Gesamtrisiko der Einführung und Umsetzung solcher Systeme am Arbeitsplatz. In den letzten Jahren hat es erste Konzepte für Cobot-spezifische Risikobewertungsinstrumente gegeben (z. B. Stone et al., 2021; Raza et al., 2021), allerdings sind nur wenige getestete und veröffentlichte Instrumente allgemein erhältlich. Bei den Risikobewertungsinstrumenten ergibt sich eine zusätzliche Herausforderung, weil sich das Umfeld, in dem viele Cobots betrieben werden, häufig ändert. Dennoch ist eine korrekte und fundierte Risikobewertung einer Technologie am Arbeitsplatz von zentraler Bedeutung, um Sicherheit und Gesundheit bei der Arbeit sicherzustellen, und das Fehlen von Bewertungsinstrumenten, die dies für fortgeschrittene Robotiksysteme, Cobots und KI-basierte Systeme für Automatisierungstätigkeiten erbringen können, ist bei der zukünftigen Entwicklung in Betracht zu ziehen.
5 Zusammenfassung und
Schlussfolgerung
Bei der Analyse der Tätigkeitsarten und des Grads der Automatisierung, für die gegenwärtig fortgeschrittene Robotikanwendungen zum Einsatz kommen, zeigt sich eine starke Konzentration auf personen- und objektbezogene Routinetätigkeiten bei Halbautomatisierung bzw. Vollautomatisierung. Unter den personenbezogenen Tätigkeiten finden sich viele Pflegetätigkeiten, wie das Heben von Patienten oder ihre Unterstützung beim Essen und Trinken. Weiterhin werden Operations- und andere medizinische Tätigkeiten ganz oder teilweise unterstützt. Bei den objektbezogenen Tätigkeiten ist eine starke Konzentration auf Tätigkeiten zu beobachten, die im Fertigungssektor, in der Lagerhaltung und im Handwerk weit verbreitet sind. Ferner ist festzustellen, dass Verpackungs- sowie Transport- und Liefertätigkeiten in verschiedenen Bereichen wie Fertigung, Krankenhäusern und Lagerhaltung voll automatisiert sind. Montagetätigkeiten sind objektbezogene Tätigkeiten, bei denen eine teilweise Unterstützung durch fortgeschrittene Robotik zu beobachten ist.
Ein wesentliches Ergebnis ist, dass in der wissenschaftlichen Literatur Risiken und Chancen im Zusammenhang mit Sicherheit und Gesundheit bei der Arbeit nicht oder nur selten tätigkeitsbezogen betrachtet werden. Es fehlt eindeutig an Studien zu Mensch-Roboter-Interaktion (MRI) und den damit verbundenen Risiken und Chancen im Zusammenhang mit Sicherheit und Gesundheit bei der Arbeit im Hinblick auf rein physische Tätigkeiten. Die vorgestellten Ergebnisse können daher in gewissem Maße als allgemeine Ergebnisse betrachtet werden, die für alle Robotikanwendungen gelten.
Der wissenschaftlichen Literatur waren vorrangig vier verschiedene MRI-Dimensionen zu entnehmen, die mit unterschiedlichen Risiken und Chancen im Zusammenhang mit Sicherheit und Gesundheit bei der Arbeit in Verbindung gebracht werden können: Funktions- oder Tätigkeitszuweisung, Gestaltung der Tätigkeit und Gestaltung der Interaktion sowie Betrieb und Beaufsichtigung.
Im Hinblick auf die Dimension der Zuweisung von Funktion oder Tätigkeit erweist sich, dass diese Prozesse dynamischer werden könnten, da die Robotiksysteme eine flexible Nutzung versprechen. Wenn beide richtig umgesetzt werden, kann dies die Systemleistung steigern, Fehler reduzieren, die Arbeitsbelastung optimieren und Motivation, Zufriedenheit und Wohlbefinden steigern. Allerdings zählen zu den mit der Funktionszuweisung verbundenen Risiken eine Reihe von Auswirkungen auf den Menschen, wie Complacency-Wirkungen, Decision Bias (verzerrte Entscheidungsfindung), verringertes Lagebewusstsein, Unausgewogenheit der psychischen Arbeitsbelastung, Misstrauen und übermäßiges Vertrauen. Ein höherer Grad der Automatisierung kann die psychische Arbeitsbelastung eines Bedieners verringern, aber auch zum Verlust des Lagebewusstseins und einer schlechteren Fehlerleistung führen (Onnasch et al., 2014).
Im Hinblick auf die Gestaltung der Tätigkeit ist infolge des Prozesses der Funktionszuweisung insbesondere die Gefahr eines geringen Grads der Kontrolle über die eigene Arbeit hervorzuheben und damit einhergehend ein weitgehendes Fehlen des Gefühls, die Kontrolle zu haben, eine geringe Selbstwirksamkeit, geringe Zufriedenheit und Motivation sowie beeinträchtigtes Wohlbefinden. Ein hohes Maß an Roboterautonomie war ebenfalls verbunden mit dem Gefühl, weniger Kontrolle zu haben, und in geringerem Maß für die Arbeitsaufgabe verantwortlich zu sein. Eine enge Kopplung des Beschäftigten an die Aufgabe des Roboters birgt zudem das Risiko einer erhöhten Belastung.
Die Anwendung bekannter Grundsätze für die Gestaltung kommt dem gesamten Interaktionsprozess zugute. Ihr Fehlen wirkt sich negativ aus. Die Bedeutung mancher Grundsätze für die Gestaltung kann sich womöglich ändern, insbesondere da die Forderung nach Transparenz der Gestaltung und des Verhaltens der Robotik wesentlich ist, um mögliche Risiken zu vermeiden, wie ein weniger ausgeprägtes Gefühl, verantwortlich und rechenschaftspflichtig zu sein, übermäßiges oder nicht ausreichendes Vertrauen sowie ein Gefühl der Entfremdung oder des Kontrollverlusts.
Es ist zu betonen, dass sich mit dem Einsatz fortgeschrittener Robotik in gefährlichen Arbeitsumgebungen eindeutig Chancen für den Arbeitsschutz ergeben. Robotiksysteme bieten zum einen die Möglichkeit, dass Menschen überhaupt nicht mehr unter diesen ungünstigen Bedingungen arbeiten müssen. Zum anderen können Robotiksysteme insbesondere bei Montage- und Hebetätigkeiten die körperliche Gesundheit im Hinblick auf Muskel- und Skeletterkrankungen verbessern. Physische Risiken wie Zusammenstöße oder Gefahren durch Ausfall von Mechanik oder Elektrik werden ebenfalls erwähnt.
Im Hinblick auf organisatorische Auswirkungen zeigt sich besonders die Bedeutung des Einführungs- oder Änderungsprozesses bei der Einführung fortgeschrittener Roboter am Arbeitsplatz. Wenn dieser Prozess im Hinblick auf eine geeignete Tätigkeitsanalyse, Arbeitnehmerbeteiligung, Kommunikationsstrategie und einen Prozess für die laufende Bewertung und Überwachung nicht sorgfältig durchdacht wird, riskieren die Unternehmen geringe Akzeptanz, Ablehnung und fehlende Nutzung des Systems. Wichtig ist auch der Aspekt einer geeigneten Schulung der Beschäftigten, um der Gefahr der Dequalifikation (Entwertung bestehender Fähigkeiten) und des Verlustes wesentlicher Kompetenzen zu begegnen.
Das Vertrauen im Zusammenhang mit MRI wurde außerordentlich gründlich untersucht. Die Tatsache, dass eine erfolgreiche Zusammenarbeit durch das Vertrauen zwischen den kooperierenden Parteien beeinflusst wird, ist bekannt (Costa et al., 2001). Es liegt nahe, dass Robotikeigenschaften wie Mobilität, anthropomorphe oder zoomorphe Gestaltung, multimodale Interaktionsmöglichkeiten sowie Mehrzwecknutzung für Anwendungen vor Ort und Remote-Anwendungen dazu führen, dass Menschen Robotern anders vertrauen als üblicher Automatisierungstechnologie (Hancock et al., 2011; Hancock et al., 2020). Fehlendes Vertrauen zu einem Robotiksystem kann negative Folgen für die Interaktion haben. Man könnte vermuten, dass sehr starkes Vertrauen zu einem Robotiksystem sich im Gegensatz zu mangelndem Vertrauen positiv auswirkt. Bei übermäßigem Vertrauen wird beispielsweise die Sorgfaltspflicht gegenüber dem Roboter vernachlässigt (Hancock et al., 2011), was weitere Schäden verursachen oder, wenn ein Mangel nicht erkannt wird, zu Schäden am Werkstück oder Personenschäden führen kann. Wenn der Grad des Vertrauens in den Roboter den Fähigkeiten des Roboters entspricht, kann die Zusammenarbeit effizient und sicher verlaufen (Hancock et al., 2011).
Wir konnten relevante MRI-Dimensionen bestimmen, aus denen sich konkrete Risiken und Chancen im Zusammenhang mit Sicherheit und Gesundheit bei der Arbeit ableiten ließen. Diese allgemeineren Beobachtungen zu Sicherheit und Gesundheit bei der Arbeit im Hinblick auf Robotiksysteme zeigen, dass unabhängig vom Anwendungskontext einige grundlegende Kriterien zu berücksichtigen sind. Selbst wenn die einzelnen Auswirkungen der angesprochenen Dimensionen von Arbeitsplatz zu Arbeitsplatz unterschiedlich sind, ist es ratsam, sie immer zu berücksichtigen. In diesem Kontext könnte die Durchsetzung für die herkömmlichen Arbeitsinspektionen zu einer echten Herausforderung werden. Die korrekte und fundierte Risikobewertung einer Technologie am Arbeitsplatz ist unerlässlich, um Sicherheit und Gesundheit bei der Arbeit zu gewährleisten. Eine sorgfältige Berücksichtigung der angesprochenen Risiken und Vorteile für Sicherheit und Gesundheit bei der Arbeit wird dazu führen, dass bei der Anwendung fortgeschrittener Robotik für die Automatisierung von Tätigkeiten der Mensch im Mittelpunkt steht.
Literatur
Bakker, A. B. und Demerouti, E. (2007), „The job demands-resources model: State of the art“, Journal of Managerial Psychology, 20(7), 743–757. doi:10.1108/02683940710733115
Bordia, P., Hobman, E., Jones, E., Gallois, C. und Callan, V. J. (2004), „Uncertainty during organisational change: Types, consequences and management strategies“, Journal of Business and Psychology, 18(4), 507–532. doi:10.1023/B:JOBU.0000028449.99127.f7
Costa, A. C., Roe, R. A. und Taillieu, T. (2001), „Trust within teams: The relation with performance effectiveness“, European Journal of Work and Organizational Psychology, 10(3), 225–244. doi:10.1080/13594320143000654
Demerouti, E., Bakker, A. B., Nachreiner, F. und Schaufeli, W. B. (2001), „The job demands-resources model of burnout“, Journal of Applied Psychology, 86(3), 499–512. doi:10.1037/0021– 9010.86.3.499
Denault, M. H., Péloquin, F., Lajoie, A. C. und Lacasse, Y. (2019), „Automatic versus manual oxygen titration in patients requiring supplemental oxygen in the hospital: A systematic review and meta-analysis“, Respiration, 98(2), 178–188. doi:10.1159/000499119
de Vries, G. J., Gentile, E., Miroudot, S. und Wacker, K. M. (2020), „The rise of robots and the fall of routine jobs“, Labour Economics, 66, Artikel 101885, doi:10.1016/j.labeco.2020.101885
Europäische Agentur für Sicherheit und Gesundheitsschutz am Arbeitsplatz (EU-OSHA) (2022a), Fortgeschrittene Robotik, künstliche Intelligenz und Automatisierung von Tätigkeiten: Definitionen, Einsatzgebiete, Maßnahmen und Strategien und Sicherheit und Gesundheit bei der Arbeit, abrufbar unter: https://osha.europa.eu/en/publications/advanced-robotics-artificial- intelligence-and-automation-tasks-definitions-uses-policies-and-strategies-and-occupational- safety-and-health
Fink, J. (2012), „Anthropomorphism and human likeness in the design of robots and human-robot interaction“, in: International Conference on Social Robotics (S. 199–208), Springer. doi:10.1007/978–3–642–34103–8_20
Finomore, V., Satterfield, K., Sitz, A., Castle, C., Funke, G., Shaw, T. und Funke, M. (2012), „Effects of the multi-modal communication tool on communication and change detection for command & control operators“, in: Proceedings of the Human Factors and Ergonomics Society Annual Meeting (Bd. 56, Nr. 1) (S. 1461–1465), SAGE Publications. doi:10.77/1071181312561410
Fischer, H., Engler, M. und Sauer, S. (2017), „A human-centered perspective on software quality: Acceptance criteria for work 4.0“,
in: International Conference of Design,
User Experience, and Usability (S. 570–583), Springer. doi:10.1007/978–3–319–58634–2_42
Gagne, M., Koestner, R. und Zuckerman, M. (2000), „Facilitating acceptance of organizational change: The importance of self-determination“, Journal of Applied Social Psychology, 30(9), 1843–1852, doi:10.1111/j.1559–1816.2000.tb02471.x
Hancock, P. A., Billings, D. R., Schaefer, K. E., Chen, J. Y., de Visser, E. J. und Parasuraman, R. (2011), „A meta-analysis of factors affecting trust in human-robot interaction“, Human Factors, 53(5), 517–527, doi:10.1177/0018720811417254
Hancock, P. A., Kessler, T. T., Kaplan, A. D., Brill, J. C. und Szalma, J. L. (2020), „Evolving trust in robots: Specification through sequential and comparative meta-analyses“, Human Factors, 63(7):1196–1229, doi:10.1177/001872082092208
Honig, S. S. und Oron-Gilad, T. (2018), „Understanding and resolving failures in human-robot interaction: Literature review and model development“, Frontiers in Psychology, 9, Artikel 861. doi:10.3389/fpsyg.2018.00861
Hu, J., Edsinger, A., Lim, Y. J., Donaldson, N., Solano, M., Solochek, A. und Marchessault, R. (2011), „An advanced medical robotic system augmenting healthcare capabilities-robotic nursing assistant“, in: 2011 IEEE International Conference on Robotics and Automation (S. 6264– 6269), IEEE Press, doi:10.1109/ICRA.2011.5980213
Iqbal, T., Rack, S. und Riek, L. D. (2016), „Movement coordination in human–robot teams: A dynamical systems approach“,
IEEE Transactions on Robotics, 32(4), 909–919, doi:10.1109/TRO.2016.2570240
Karasek, R. A. (1979), „Job demands, job decision latitude, and mental strain: Implications for job design“, Administrative Science Quarterly, 24(2), 285–308, doi:10.2307/2392498
Karasek, R. A. (1998), „Demand/control model: A social, emotional, and physiological approach to stress risk and active behaviour development“, in: J. M. Stellman (Hg.), Encyclopaedia of occupational health and safety (S. 34.06–34.14), Internationale Arbeitsorganisation
Kim, J. und Park, C. Y. (2020), „Education, skill training, and lifelong learning in the era of technological revolution: A review“, Asian-Pacific Economic Literature, 34(2), 3–19, doi:10.1111/apel.1229
Kozak, M., Kozak, S., Kozakova, A. und Martinak, D. (2020), „Is fear of robots stealing jobs haunting European workers? A multilevel study of automation insecurity in the EU“, IFAC- PapersOnLine, 53(2), 17493–17498, doi:10.1016/j.ifacol.2020.12.2160
Kyrarini, M., Lygerakis, F., Rajavenkatanarayanan, A., Sevastopoulos, C., Nambiappan, H. R., Chaitanya, K. K. und Makedon, F. (2021), „A survey of robots in healthcare“, Technologies, 9(1), Artikel 8, doi:10.3390/technologies9010008
Manolesou, D. G., Georgiopoulos, G., Lazaris, A. M., Schizas, D., Stamatelopoulos, K. S., Khir, A. W. und Papaioannou, T. G. (2021), „Experimental devices versus hand-sewn anastomosis of the aorta: A systematic review and meta-analysis“, Journal of Surgical Research, 258, 200–212, doi:10.1016/j.jss.2020.08.060
Matheson, E., Minto, R., Zampieri, E. G., Faccio, M. und Rosati, G. (2019), „Human-robot collaboration in manufacturing applications: A review“, Robotics, 8(4), Artikel 100, doi:10.3390/robotics804010
Nomura, T., Suzuki, T., Kanda, T., Yamada, S. und Kato, K. (2011), „Attitudes toward robots and factors influencing them“, in: K. Dautenhahn und J. Saunders (Hg.), New frontiers in human-robot interaction (S. 73–88),
John Benjamins Publishing Company, doi:10.1075/ais.2.06nom
Onnasch, L., Wickens, C. D., Li, H. und Manzey, D. (2014), „Human performance consequences of stages and levels of automation: An integrated meta-analysis“,
Human Factors, 56(3), 476– 488, doi:10.1518/107118110X1282936920199
Papadimitriou, E., Schneider, C., Tello, J. A., Damen, W., Vrouenraets, M. L. und Ten Broeke, A. (2020), „Transport safety and human factors in the era of automation: What can transport modes learn from each other?“, Accident Analysis & Prevention, 144, Artikel 105656, doi:10.1016/j.aap.2020.105656
Parasuraman, R. und Manzey, D. H. (2010), „Complacency and bias in human use of automation: An attentional integration“, Human Factors, 52(3), 381–410, doi:10.1177/0018720810376055
Plotnikov, N. S., Kolokoltseva, E. U. und Volkova, Y. V. (2020), „Technical review of robotic complexes for underground mining“, in: IOP Conference Series: Earth and Environmental Science (Bd. 459, Nr. 4) (Artikel 042025), IOP Publishing, doi:10.1088/1755–1315/459/4/04202
Raza, M., Malik, A. A. und Bilberg, A. (2021), „Virtual Modeling as a Safety Assessment Tool for a Collaborative Robot (Cobot) Work Cell Based on ISO/TS 15066: 2016“, in: Towards Sustainable Customization: Bridging Smart Products and Manufacturing Systems, 233–241, doi:10.1007/978–3–030–90700–6_26
Reichert, A. R. und Tauchmann, H. (2011), „The causal impact of fear of unemployment on psychological health“, Ruhr Economic Papers, Nr. 266, http://hdl.handle.net/10419/61355
Robelski, S. und Wischniewski, S. (2018), „Human-machine interaction and health at work: A scoping review“, International Journal of Human Factors and Ergonomics, 5(2), 93–110, doi:10.1504/IJHFE.2018.092226
Roesler, E., Onnasch, L. und Majer, J. I. (2020), „The effect of anthropomorphism and failure comprehensibility on human-robot trust“, in: Proceedings of the Human Factors and Ergonomics Society Annual Meeting (Bd. 64, Nr. 1) (S. 107–111), SAGE Publications, doi:10.1177/1071181320641028
Rosen, P. H., Sommer, S. und Wischniewski, S. (2018), „Evaluation of human-robot interaction quality: A toolkit for workplace design“, in: Proceeding of the 20th Congress of the International Ergonomics Association (S. 1649–1662), Springer, doi:10.1007/978–3–319– 96071–5_169
Sanders, T., Kaplan, A., Koch, R., Schwartz, M. und Hancock, P. A. (2019), „The relationship between trust and use choice in human-robot interaction“, Human Factors, 61(4), 614–626, doi:10.1177/0018720818816838
Sen, A., Sanjog, J. und Karmakar, S. (2020), „A comprehensive review of work-related musculoskeletal disorders in the mining sector and scope for ergonomics design interventions“, IISE Transactions on Occupational Ergonomics and Human Factors, 8(3), 113– 131, doi:10.1080/24725838.2020.1843564
Stone, R. T., Pujari, S., Mumani, A., Fales, C. und Ameen, M. (2021, September),
„Cobot And Robot Risk Assessment (CARRA) method: an Automation Level-Based Safety Assessment Tool to Improve Fluency in Safe Human Cobot/Robot Interaction“, in: Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 65(1), 737–741,
doi: 10.1177/1071181321651024
Spector, P. E. (1998), „A control theory of the job stress process“, in: C. L. Cooper (Hg.), Theories of organizational stress (S. 153–169), Oxford University Press
Terminio, R. und Rimbau Gilabert, E. (2018), „The digitalization of the working environment: The advent of robotics, automation and artificial intelligence (RAAI) from the employees perspective – A scoping review“, in: M. Coeckelbergh, J. Loh, M. Funk, J. Seibt und M. Nørskov (Hg.), Envisioning robots in society – Power, politics and public space (S. 166–176), IOS Press, doi:10.3233/978–1–61499–931–7–166
Viswesvaran, C., Sanchez, J. I. und Fisher, J. (1999), „The role of social support in the process of work stress: A meta-analysis“, Journal of Vocational Behavior, 54(2), 314–334, doi:10.1006/jvbe.1998.1661
Zlotowski, J., Proudfoot, D., Yogeeswaran, K. und Bartneck, C. (2015), „Anthropomorphism: Opportunities and challenges in human–robot interaction“, International Journal of Social Robotics, 7(3), 347–360, doi:10.1007/s12369–014–0267–6
Europäische Agentur für Sicherheit und Gesundheitsschutz am Arbeitsplatz
Santiago de Compostela 12
48003 Bilbao, Spanien
E-Mail:
information@osha.europa.eu


